W latach 80 ubiegłego wieku Robert Bosch założył w Stuttgarcie firmę BOSCH. Jej inżynierowie opracowali szeregową magistralę komunikacyjną o nazwie CAN (Controller Area Network) na potrzeby rynku motoryzacyjnego. Na początku sieć CAN była wykorzystywana w samochodach osobowych: w systemie ABS, do pomiaru prędkości oraz kontroli parametrów silnika. Pierwszą implementacją może pochwalić się Mercedes Benz w serii S z roku 1992.
Sieć CAN spełnia wszystkie krytyczne wymagania stawiane przez przemysł motoryzacyjny, tzn. niezawodność, duży zasięg, odporność na zakłócenia, szybkość transmisji danych przesyłanych zdarzeniowo lub cyklicznie. Wprowadzenie magistrali obniżyło koszty okablowania, wagę pojazdów oraz znacząco uprościło schemat elektryczny. To nowoczesne i niezawodne rozwiązanie z biegiem czasu zostało zaimplementowane w automatyce przemysłowej i budynkowej.
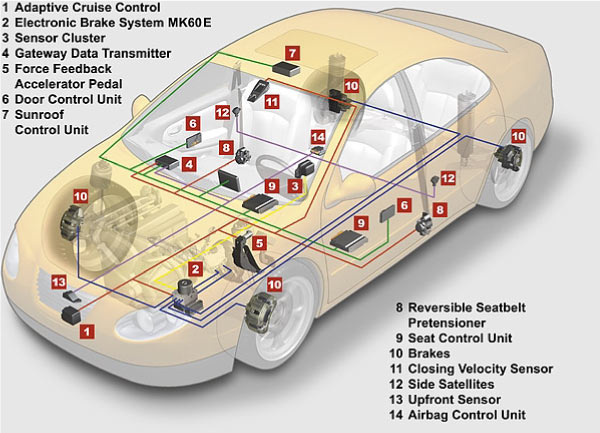
Rys.1. Przekładowy schemat sieci CAN w samochodzie osobowym
Warstwą fizyczną magistrali CAN jest najczęściej dwuprzewodowa skrętka. Jako medium można również wykorzystać światłowód, lecz wtedy będzie to komunikacja wyłącznie punkt-punkt. Radiowa wersja CAN korzysta z technologii WLAN oraz Bluetooth. Prędkość przesyłania ramek komunikacyjnych zależna jest od fizycznej długości magistrali i zawiera się w przedziale od 10 kbit/s do maksymalnie 1 Mbit/s.
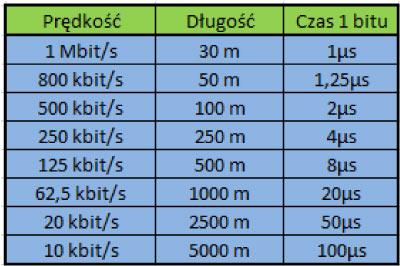
Rys.2. Tabela zależności prędkości sieci CAN od długości magistrali
Magistrala jest najczęściej spotykaną topologią sieci CAN. Ważnym aspektem przy projektowaniu trasy kablowej jest zachowanie zasady prowadzenia przewodów bezpośrednio od jednego urządzenia do drugiego, wykorzystując przy tym wtyczki przelotowe z możliwością terminacji, takie jak przedstawiona poniżej.
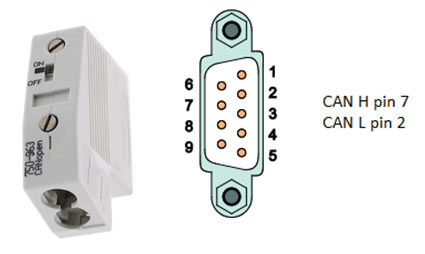
Rys.3. Wtyczka CAN z opcjonalną terminacją
Tak zwane „odnogi” czy „trójniki” nie są najlepszym rozwiązaniem, bo mogą powodować niewłaściwe dzianie sieci. Jeżeli jesteśmy zmuszeni do zastosowania odciągu, to nie powinien on być dłuższy niż 30 cm. Na obu końcach magistrali stosujemy rezystory 120 Ohm.
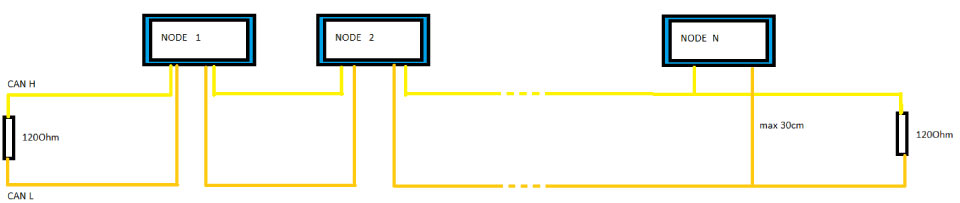
Rys.4. Schemat połączeń w sieci CAN
Jedną z największych zalet sieci CAN jest duża odporność na zakłócenia. Ta cecha zaważyła na tym, że jest to najczęściej stosowany standard w przemyśle kolejowym. W panujących tam bardzo trudnych warunkach, m.in. zakłócenia od trakcji zasilającej, falowników oraz silników, CAN radzi sobie bardzo dobrze dzięki napięciowemu sygnałowi różnicowemu.
Napięcia na przewodach CAN H i CAN L względem lokalnej masy dla bitu recesywnego (logiczna jedynka) mają stały poziom 2,5 V DC. Przy przesyłaniu bitu dominującego (logiczne zero) CAN H przechodzi na 3,5 V DC, a CAN L na 1,5. Różnica napięć wynosi zatem 2 V. Logiczną jedynkę mamy wtedy, gdy różnica napięć pomiędzy CAN H i CAN L zawiera się w przedziale 0-0,5 V, natomiast logiczne zero 0,9-2 V. Jeśli na magistrali pojawi się zewnętrzne napięcie zakłócające, to różnica napięć na skręconych przewodach będzie nadal taka sama.
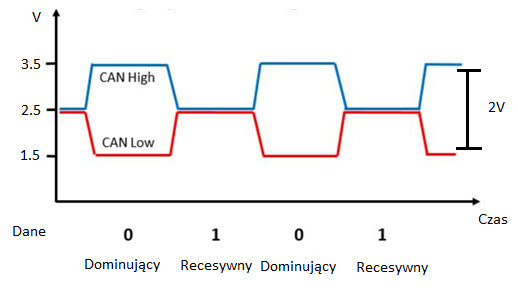
Rys.5. Poziomy napięć i stany logiczne w sieci CAN
W sieci CAN możemy zastosować maksymalnie 127 urządzeń. Jest to sieć typu Multi Master, czyli każde urządzenie może wymieniać dane z każdym. Komunikaty są wysyłane rozgłoszeniowo, co oznacza, że wszystkie urządzenia słuchają komunikatu, lecz tylko te, które są odpowiednio zaprogramowane, odbierają dane. Mogą one być wysyłane cyklicznie lub zdarzeniowo. Dostęp do magistrali rozstrzyga arbitraż.
Na rysunku nr 6 pokazany jest przykład jednoczesnego (w tym samym momencie) rozpoczęcia transmisji przez węzły A i B. Węzeł A chce przesłać wiadomość o identyfikatorze 16#ef(binarnie 1110 1111), a B 16#ed(1110 1101). Komunikaty różnią się przy bicie ID1. Dostęp do magistrali otrzymuje węzeł B, ponieważ dominującym bitem jest „0”. Węzeł A przestaje nadawać i po pewnym czasie podejmuje ponowną próbę wysłania komunikatu. Dzięki arbitrażowi urządzenia mogą nadawać telegramy zdarzeniowo. Nadajnik wygrywający arbitraż ani na chwilę nie przerywa transmisji. Budynkowa sieć KNX wzoruje się na sieci CAN. Przyciski KNX wysyłają dane zdarzeniowo do kilku aktorów i tylko te znajdujące się w tej samej grupie adresowej odbierają informacje.
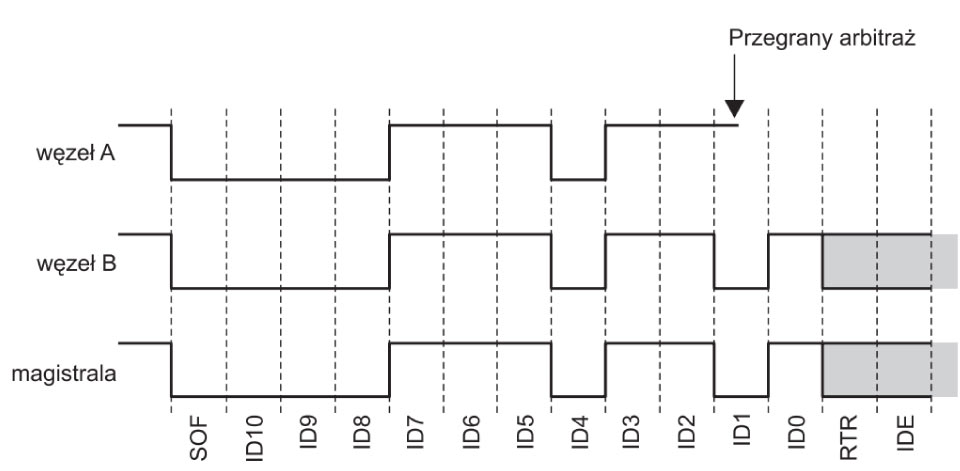
Rys.6. Arbitraż dostępu do magistrali w sieci CAN
Porównując sieć CAN z innymi standardami praktycznie w każdym zestawieniu widać jej przewagę. CAN – podobnie jak standard RS-485 – pozwala na tworzenie bardzo rozległych systemów sterowania i monitoringu. Długość magistrali może wynosić nawet do 5000 metrów przy bardzo niskich prędkościach. W przeciwieństwie do RS-485 w CAN każde urządzenie może nadawać telegramy zdarzeniowo. Taka funkcjonalność jest wielką zaletą w rozproszonych systemach wymagających szybkiego reagowania. W ostatnim czasie większość sieci komunikacyjnych zostaje wypierana przez coraz to popularniejszy Ethernet. Przede wszystkim ze względu na dużą przepustowość, szybkość komunikacji oraz swobodę w wyborze topologii. Istotnym ograniczeniem Ethernetu jest maksymalna odległość sąsiadujących urządzeń, wynosząca tylko sto metrów oraz mniejsza niż w CAN odporność na zakłócenia. Dzięki swoim niepodważalnym zaletom sieć CAN jest jedną z najbardziej uniwersalnych sieci komunikacyjnych i jeszcze długo nie zastanie zastąpiona przez inne standardy.
Dominik Broniszewski, WAGO.PL
Przeczytaj część drugą: